Seaperch Underwater ROV
Team Founder/Team Co-Captain 2022
Brief Summary
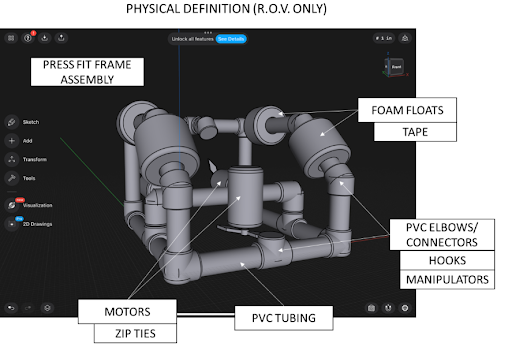
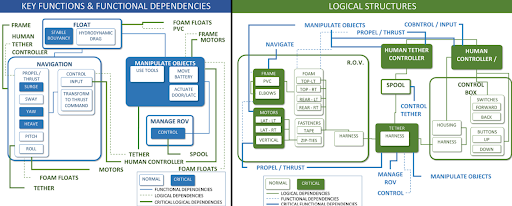
As part of a team, I helped design and build a Remotely Operated Vehicle (ROV) for the SeaPerch International Competition. Our goal was to navigate obstacles and remove trash from the pool floor efficiently. We constructed a lightweight, neutrally buoyant ROV using PVC pipes, motor weights, and flotation tubes for precise maneuverability. Through iterative testing, we refined the mechanism and developed a hook system for effective debris retrieval.
Business/Organization Outcome
Our efforts resulted in a 5th place overall finish in an international field of 100+ teams. Additionally, we won 1st place in video documentation and 5th place in the team portfolio category. These achievements highlighted the critical role of technical documentation and effective teamwork in engineering competitions. The project demonstrated the real-world impact of robotics in marine cleanup efforts, aligning with broader sustainability and engineering objectives.
Personal Outcome
This project deepened my understanding of buoyancy, robotics, and iterative design while reinforcing the importance of technical documentation and teamwork. It was a hands-on experience that strengthened my problem-solving abilities and further aligned with my passion for engineering innovation. The competition also sharpened my skills in design optimization and rapid prototyping.